Intelligent control of neuromorphic systems
Check out our new paper on intelligent control of neuromorphic systems: [Link].
Neuromorphic circuits are based on the underlying principles of the nervous system and are intended to be employed in brain-inspired machines. They represent an important alternative to deal with contemporary challenges faced by conventional computer systems, such as the von Neumann bottleneck and the end of both Moore’s law and Dennard scaling. Standard computer systems are commonly based on classic von Neumann architecture, where the memory part is separate from the central processing unit (CPU). This continuous data transfer between the CPU and the memory unit generates unavoidable latency and power consumption issues. As matter of fact, along with the increased energy consumption caused by the von Neumann bottleneck, scaling problems related to Moore’s law also cause overheating. Neuromorphic systems, on the other hand, are considered low-power devices and allow for a much lower thermal budget. In this context, they have recently been employed in a wide range of applications, from robotics and computer vision to neuroprosthetics and brain–machine interfaces.
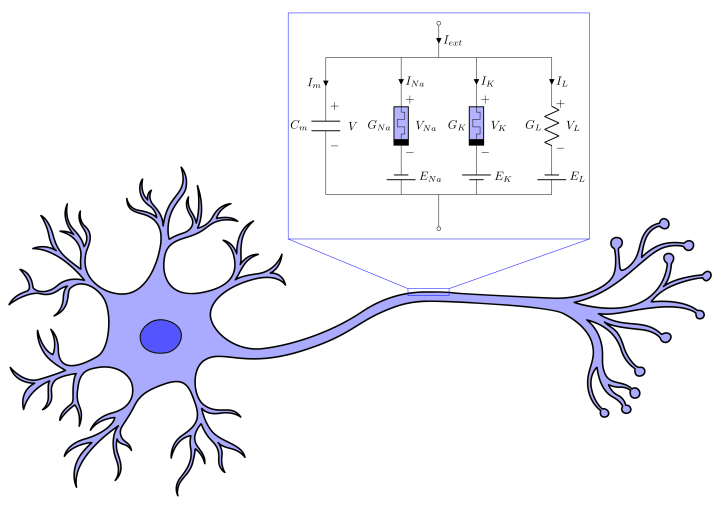
In this work, we introduce a novel intelligent controller for the suppression of seizure-like events in a memristive neuromorphic circuit based on the Hodgkin–Huxley model. For this purpose, an adaptive neural network is incorporated into a Lyapunov-based nonlinear control scheme, which allows the attenuation of bursting dynamics, even assuming that there is no prior knowledge of the mathematical model of the circuit. By means of a Lyapunov-like stability analysis, the boundedness and convergence properties of the closed-loop signals are rigorously proved. The obtained numerical results confirm that the intelligent control law is capable of dealing with the nonlinear behavior of memristive components, as well as with uncertainties and external disturbances, presenting a much superior performance when compared with a conventional nonlinear controller.