Robots in dynamically changing environments
Robots have been successfully employed in industry for a long time. This is largely due to the fact that generally in industries the operation of robots is limited to environments that do not change with time and that have been carefully prepared to minimize the challenges to robot actions. In well-structured environments, robots are practically not subject to uncertainties and external disturbances and, in this sense, conventional control schemes are capable of guaranteeing the necessary performance and safe operating conditions.
But can we ensure the same performance and reliability in ever-changing environments? Can we trust robots to safely interact and collaborate with us in performing everyday tasks? The challenges in this scenario are certainly much greater than those faced by designers of industrial manipulators.
Machine learning algorithms, such as artificial neural networks, can be conveniently embedded in robot control systems to improve their performance. It is worth noting, however, that supervised and offline learning schemes are not sufficient in the case of dynamically changing environments. First, the algorithm must be able to deal with uncertainties and disturbances even if the signal to be estimated cannot be measured directly. Online learning rather than offline training should be used to allow the robot to continuously learn by interacting with the environment.
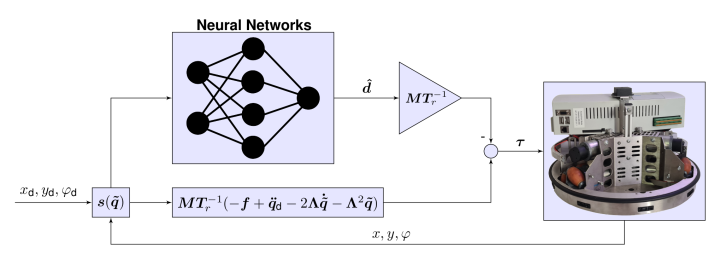
In a paper that has just been published, Gabriel S. Lima, Victor F. Moreira and Wallace M. Bessa show that the adoption of an intelligent compensation scheme based on adaptive neural networks allows a reduction of more than 95% in the tracking error, guaranteeing high performance even when the robot is navigating in an uncertain environment. The algorithm is based on online learning, which allows the robot to learn while interacting with the environment. Furthermore, the experimental results confirm that the proposed scheme is light enough to be deployed in the low-power embedded hardware of mobile robots.
Check out our new paper on accurate trajectory tracking for mobile robots: [Link].